Le Massachusetts Institute of Applied sciences a présenté une nouvelle model du robotic Cheetah – le Cheetah 3. Le nouveau robotic est désormais succesful d’effectuer de multiples mouvements avancés tels que galoper sur un terrain accidenté, monter des escaliers jonchés de débris et de particules, retrouver son équilibre après avoir été touché. , sauter sur des surfaces plus élevées, and many others. De plus, le Cheetah 3 fait tout cela sans l’aide de caméras – en d’autres termes, à l’aveuglette.
Voici remark le MIT décrit cette technologie de mouvement aveugle :
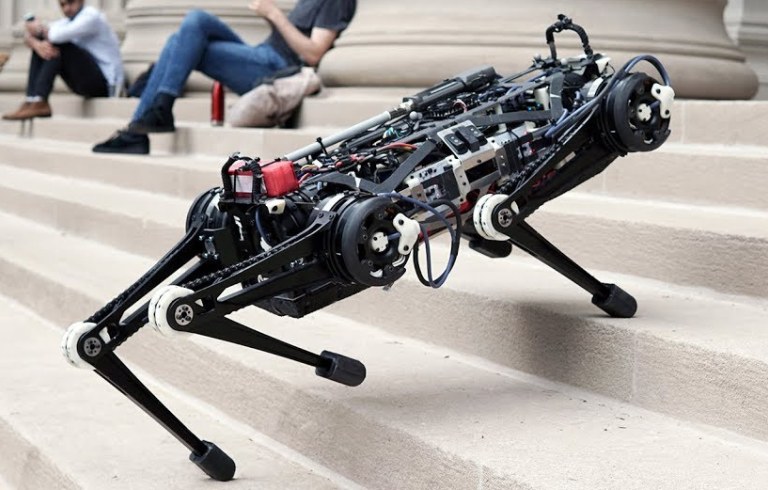
La bête mécanique de 90 livres – de la taille d’un Labrador adulte – est intentionnellement conçue pour faire tout cela sans s’appuyer sur des caméras ou des capteurs environnementaux externes. Au lieu de cela, il “despatched” avec agilité son chemin à travers son environnement d’une manière que les ingénieurs décrivent comme une “locomotion aveugle”, un peu comme se frayer un chemin à travers une pièce noire.
Le MIT cite également Sangbae Kim, le concepteur de ce robotic, qui a déclaré :
Il existe de nombreux comportements inattendus que le robotic devrait être succesful de gérer sans trop compter sur sa imaginative and prescient.
La imaginative and prescient peut être bruyante, légèrement inexacte et parfois indisponible, et si vous comptez trop sur la imaginative and prescient, votre robotic doit être très précis en place et finira par être lent. Nous voulons donc que le robotic s’appuie davantage sur les informations tactiles. De cette façon, il peut gérer des obstacles inattendus tout en se déplaçant rapidement.
Ce projet a été soutenu par Naver, le Toyota Analysis Institute, Foxconn et l’Air Pressure Workplace of Scientific Analysis. Les développeurs présenteront les nouvelles capacités du robotic Cheetah 3 en octobre lors de la Conférence internationale sur les robots intelligents, à Madrid.
Du level de vue de l’utilisation militaire, ces robots peuvent devenir un atout précieux au niveau de l’escouade permettant de transporter des équipements et des munitions supplémentaires tout en accompagnant les troupes dans des environnements de terrain accidenté où l’utilisation de véhicules à roues ou à chenilles est soit physiquement not possible, soit tactiquement désavantageuse. Ces robots peuvent également être des outils importants pour la reconnaissance et les opérations dans des zones et des environnements à haut risque où la présence de personnel peut être dangereuse sans justification.
Sources:
Chu J. (2018, 4 juillet). “Le robotic “Aveugle” Cheetah 3 peut monter des escaliers semés d’obstacles”. Bureau des nouvelles du MIT. Extrait de : http://information.mit.edu/2018/blind-cheetah-robot-climb-stairs-obstacles-disaster-zones-0705
Photos de ww.mit.edu